SPI (Serial Peripheral Interface) – последовательный синхронный стандарт передачи данных в режиме полного дуплекса, разработанный компанией Motorola для обеспечения простого и недорогого сопряжения микроконтроллеров и периферии. SPI также иногда называют четырехпроводным (англ. four-wire) интерфейсом.SPI является синхронным протоколом, в котором любая передача синхронизирована с общим тактовым сигналом, генерируемым ведущим устройством (процессором). Принимающая периферия (ведомая) синхронизирует получение битовой последовательности с тактовым сигналом. К одному последовательному периферийному интерфейсу ведущего устройства-микросхемы может присоединяться несколько микросхем. Ведущее устройство выбирает ведомое для передачи, активируя сигнал «выбор кристалла» (chip select) на ведомой микросхеме. Периферия, не выбранная процессором, не принимает участие в передаче по SPI.
В SPI используются четыре цифровых сигнала:
- MOSI или SI – выход ведущего, вход ведомого (англ. Master Out Slave In). Служит для передачи данных от ведущего устройства ведомому;
- MISO или SO – вход ведущего, выход ведомого (англ. Master In Slave Out). Служит для передачи данных от ведомого устройства ведущему.
- SCK или SCLK – последовательный тактовый сигнал (англ. Serial CLocK). Служит для передачи тактового сигнала для ведомых устройств.
- CS или SS – выбор микросхемы, выбор ведомого (англ. Chip Select, Slave Select).Как правило, выбор микросхемы производится низким логическим уровнем.
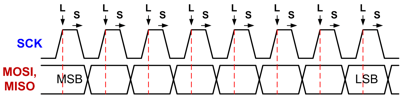
В зависимости от комбинаций полярности и фазы синхроимпульсов возможны четыре режима работы SPI.
| Режим SPI | Временная диаграмма |
| Режим SPI0 Активные уровень импульсов - высокий. Сначала защёлкивание, затем сдвиг. |
 |
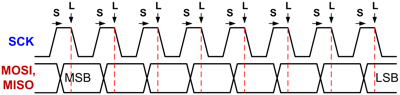
| Режим SPI1 Активные уровень импульсов - высокий. Сначала сдвиг, затем защёлкивание. |
 |
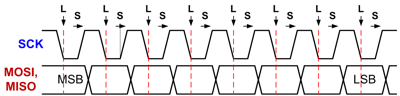
| Режим SPI2 Активные уровень импульсов - низкий. Сначала защёлкивание, затем сдвиг. |
 |
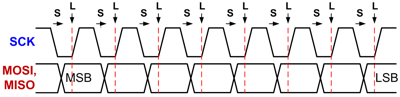
| Режим SPI3 Активные уровень импульсов - низкий. Сначала сдвиг, затем защёлкивание. |
 |
В таблице принято:
- MSB - старший бит;
- LSB - младший бит.
Мастеру приходится настраиваться на тот режим, который используется ведомым.
При обмене данными по интерфейсу SPI микроконтроллер может работать как ведущий (режим Master) либо как ведомый (режим Slave). При этом пользователь может задавать следующие параметры:
- режим работы в соответствии с таблицей;
- скорость передачи;
- формат передачи (от младшего бита к старшему или наоборот).
Соединение двух микроконтроллеров по структуре ведущий – ведомый по интерфейсу SPI осуществляется по следующей схеме.
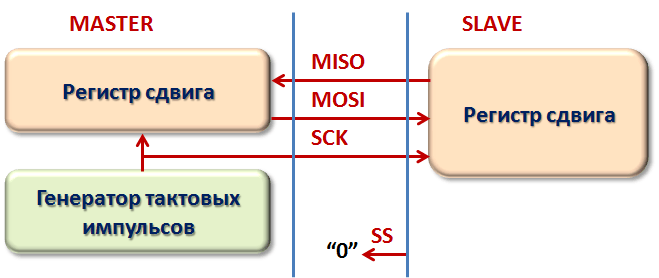
Выводы SCK, CS для ведущего микроконтроллера являются выходами, а ведомого микроконтроллера – входами.
Передача данных осуществляется следующим образом. При записи в регистр данных SPI ведущего микроконтроллера запускается генератор тактового сигнала модуля SPI, и данные начинают побитно выдаваться на вывод MOSI и соответственно поступать на вывод MOSI ведомого микроконтроллера. После выдачи последнего бита текущего байта генератор тактового сигнала останавливается с одновременной установкой в «1» флага «Конец передачи». Если поддерживаются и разрешены прерывания от модуля SPI, то генерируется запрос на прерывание. После этого ведущий микроконтроллер может начать передачу следующего байта либо, подав на вход SS ведомого напряжение уровня логической «1», перевести его в состояние ожидания.
Одновременно с передачей данных от ведущего к ведомому происходит передача и в обратном направлении, при условии, что на входе SS ведомого присутствует напряжение низкого уровня. Таким образом, в каждом цикле сдвига происходит обмен данными между устройствами. В конце каждого цикла флаг прерывания устанавливается в «1» как в ведущем микроконтроллере, так и в ведомом. Принятые байты сохраняются в приемных буферах для дальнейшего использования.
При приеме данных принятый байт должен быть прочитан из регистра данных SPI до того, как в сдвиговый регистр поступит последний бит следующего байта. В противном случае первый байт будет потерян.
Вывод SS предназначен для выбора активного ведомого устройства и в режиме Slave всегда является входом. Каждый раз, когда на вывод SS подается напряжение уровня логической «1», происходит сброс модуля SPI. Если изменение состояния этого вывода произойдет во время передачи данных, и прием, и передача немедленно прекратятся, а передаваемый и принимаемый байты будут потеряны.
Если микроконтроллер находится в режиме Master, направление передачи данных через вывод SS определяется пользователем. Если вывод сконфигурирован как выход, он работает как линия вывода общего назначения и не влияет на работу модуля SPI. Как правило, в этом случае он используется для управления выводом SS микроконтроллера, работающего в режиме Slave.
Если вывод сконфигурирован как вход, то для обеспечения нормальной работы модуля SPI на него должно быть подано напряжение высокого уровня. Подача на этот вход напряжения низкого уровня от какой-либо внешней схемы будет воспринята модулем SPI как выбор микроконтроллера в качестве ведомого (при этом ему начинают передаваться данные).
Пример использования интерфейса SPI для микроконтроллеров STM32 хорошо описан в этой статье.
Назад
